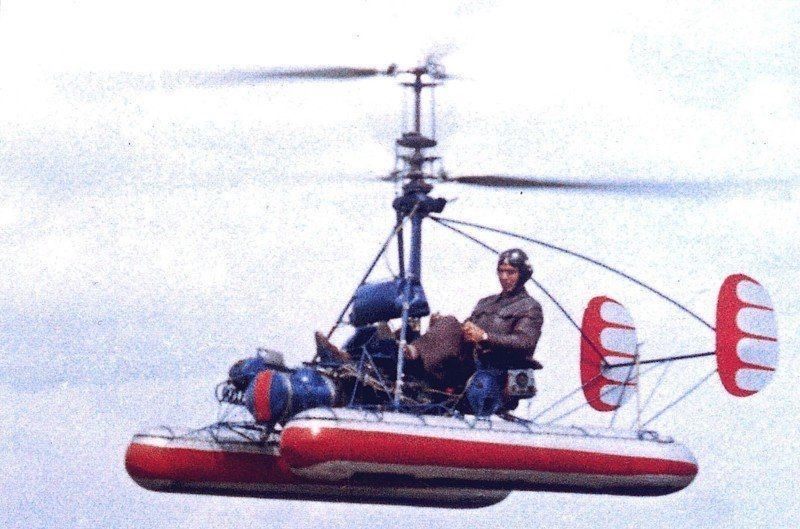
In 1951 various attempts were being made to increase the effective range of helicopters, notably by towing them in the outward direction behind an Li-2, with the lifting rotor autorotating. The idea occurred to Kamov designer Vladimir Barshevsky that it would be possible to dispense with the tug aircraft if a helicopter could be provided with wings and an aeroplane propulsive system. After obtaining permission from Kamov, his deputy V. V. Nikitin took a proposal to the Kremlin and in a matter of days the OKB had a Stalin directive to get started. In response to the GOR issued by the Ministry of Defence, Kamov decided to build an experimental compound helicopter, the Ka-22. Dubbed “Vintokryl” (lit. “screw-wing”), it featured two lifting rotors and two tractor propellers for forward thrust, both mounted at the wingtips. This was an aircraft, combining the advantages of the helicopter capable of vertical take-off and landing and of the aeroplane possessing greater lifting capacity, range and speed as compared to the helicopter.
N.I.Kamov focused the attention of the team on the design of high-speed lifting rotors which would enable the compound aircraft to cruise at 400-450km/h. At high forward speeds the wing was intended to decrease rotor disc loading as much as possible, ensuring low drag factors. This allowed the tips of the main rotor blades to reach the speed of sound and the rotor to work in a mode close to autorotation. N.I.Kamov’s decision to retain minimum required rotor disc loading at high speed sufficient for damping rotor oscillations and for ensuring stable rotor behaviour during manoeuvers proved to be of fundamental importance.
The engines were to be TV-2 (later TV-2VK) turboshafts supplied by N. D. Kuznetsov, and many organizations were involved in research for this challenging project, starting with model tests in the T-101 tunnel at CAHI. The final go-ahead was issued on 11th June 1954. An order for three Ka-22s was placed on the factory at Ukhtomskaya, which had been derelict since Kamov was evacuated from there in October 1941. Concentration on the small Ka-15 (the OKB’s first production helicopter) and other problems so delayed the programme that on 28th March 1956 prototypes 2 and 3 were cancelled.

Development and construction of the Ka-22, project 1955, under the leadership of S.Ya.Finkel, developed a whole set of methods to determine the aircraft’s parameters, rotor blade configuration, basic performance characteristics of the rotorcraft and its aerodynamic design, to calculate aerodynamic loads, aerodynamic balancing etc. Special research was made to ensure optimum characteristics in transitional flight modes, to select structural stiffness characteristics of the airframe components, to prevent rotor blade flutter and “ground resonance”.
A major contribution to the creation of the Ka-22 was made by S.B.Garshtein, AI.Dreizin, Z.Z.Rosenbaum, A.G.Satarov, E.A.Petrosian, L.A.Potashnik, V.N.Kvokov and other members of the OKB staff, as well as by TsAGI specialists M.K.Speransky, I.O.Faktorovich and E.V.Tokarev.
Work on the unique powerplant and systems of the aircraft was headed by deputy chief designer N.N.Priorov, and deputy chief designer M.A.Kupfer was responsible for the rotor system and the airframe. Yu.S.Braginsky was appointed Ka-22 leading designer and V.B.Al’perovich was the leading engineer of the flight test programme. First deputy chief designer V.I.Biryulin was responsible for all the work on the compound helicopter.
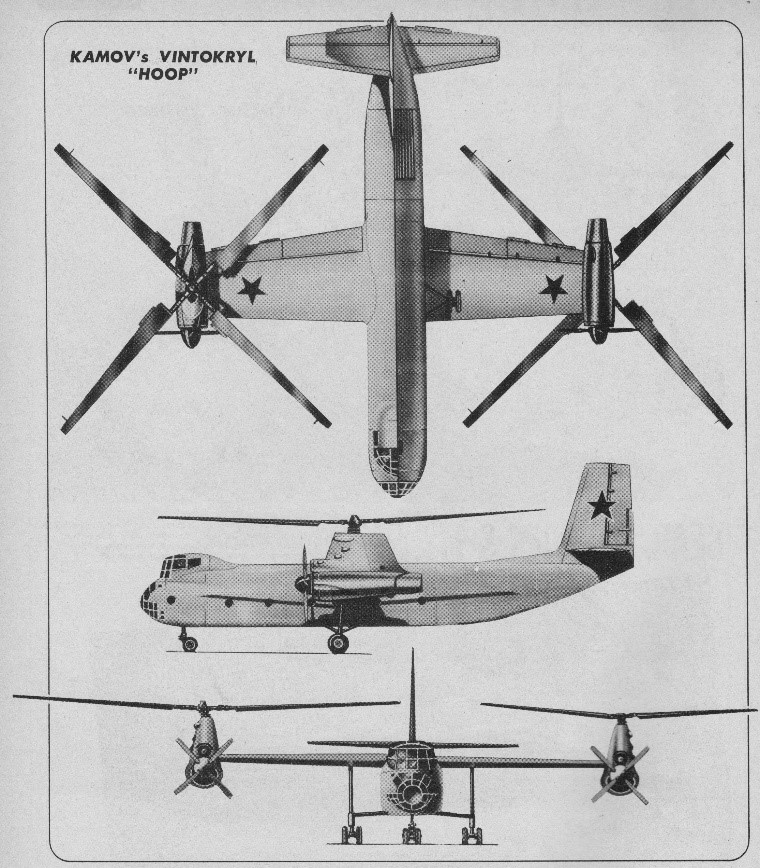
The Ka-22 was basically a stressed-skin compound helicopter with its engines on the wingtips, with geared drives to both propellers and lifting rotors. The airframe was all light alloy stressed-skin, the high wing having powered ailerons and plain flaps depressed 90° in helo mode, with auto control linking fuel flow with prop pitch in cruise. The fuselage had a glazed nose, three-seat cockpit above the nose and a main cargo area 17.9×3.1×2.8m for 80 seats or 16.5 tonnes of cargo. The entire glazed nose could swing open to starboard for loading bulky items or a vehicle. The high flight deck carried two pilots and a radio engineer. The original prototype was powered by 5,900shp TV-2VK engines, but these were later replaced by the 5,500shp D-25VK. These had free turbines geared via a clutch to the main rotor and via a front drive to the four-blade propeller and a fan blowing air through the oil cooler from a circular inlet above the nacelle. The two free-turbine outputs were interconnected by a 12-part high-speed shaft ‘about 20m long’. The propulsion system, in the form of a pair of 5600 horsepower Ivchenko turbine engines, provided the propulsive force for both the lifting flat-mounted rotors and the normally-positioned forward-pushing propellers. The tailpipes of these powerplants are assessed to have tail pipes that can be deflected downward to provide additional lift during the vertical flight phase of the trajectory. The main rotors were larger derivatives of those of the Mi-4. In helicopter mode the propeller drive was declutched and the flaps were fully lowered.
Flight control was by differential cyclic and collective pitch. In aeroplane mode the lifting rotors were free to windmill and the aircraft was controlled by the ailerons and tail surfaces. The twin-wheel landing gears were fixed. A conventional aeroplane tail was used only in aeroplane mode.
The engine normally has a rear drive from a free turbine, and the installation has a rear jetpipe and air from inlet ducted round underside of cowling, driving at rear to high-speed shaft to reduction gearbox under rotor shaft, from which front drive goes to propeller. Upper circular inlet feeds fan-assisted oil cooler.
Superficially rotors and hubs resembled those of Mi-4 and Yak-24, but with trailing-edge tabs inboard; handed, left rotor being clockwise seen from above.
In June 1958 the LD-24 rotor blades began testing on an Mi-4. The Ka-22 itself first lifted from the ground on 17th June 1959, and made its first untethered flight on 15th August 1959, the test crew being led by pilot D. K. Yefremov. Serious control difficulties were encountered, and the Kamov team were joined by LII pilots V.V.Vinitskii and Yu.A.Garnayev. Though still full of problems the Vintokryl was demonstrated on 11th October 1959 to MAP Minister P.V.Dement’yev and VVS C-in-C K.A.Vershinin. Gradually difficulties were solved and in July 1960 an order was received to manufacture three Ka-22s at GAZ No.84 at Tashkent, with D-25VK engines.
On 23rd May 1961 a speed of 230km/h was held for 37 minutes. On 9th July 1961 the Ka-22 caused a sensation at the Aviation Day at Tushino.
In 1961 an OKB test crew captained by D.K.Yefremov, assisted by V.V.Gromov, set eight world records on the Ka-22, including the world helicopter speed record and the payload to 2000m altitude record. On 7th October 1961, with spats over the wheels and a fairing behind the cockpit, a class speed record was set at 356.3km/h, followed on 12th October by 336.76km/h round a 100km circuit. The spats and fairing were then removed and on 24th November 1961 a payload of 16,485kg was lifted to 2,557m.
OKB testing was completed early 1964.
The compound helicopter was impressive by any standards: maximum take-off weight was 42500kg; the cargo cabin was 17.9m long, 2.8m high and 3.1m wide. To compare the maximum take-off weight of the then biggest Kamov helicopter, the Ka-25, was 7000kg.
Preparations were then made to ferry AM 0I-01 and the third machine AM 0I-03 from Tashkent to Moscow for Nil acceptance testing. Both departed on 28th August 1962. While making an intermediate stop at Dzhusaly 0I-01 rolled to the left and crashed inverted, killing Yefremov and his crew of six. The cause was diagnosed as ‘disconnection of No 24 cable joint of the linkage with the starboard lift rotor collective-pitch control unit’. At Tashkent and in Turkestan the cable joints and cyclic-pitch booster brackets were inspected on 0I-02 and 0I-03 and found to be incorrectly assembled. Changing the direction of rotation of one lifting rotor did little at lower speeds and caused problems at higher speeds – ‘When’, said lead engineer V.S.Dordan, ‘Shockwaves off the blades sounded like a large machine gun’. To improve stability and controllability the complex AP-116 differential autopilot was installed, continuously sensing attitude and angular accelerations, feeding the KAU-60A combined flight-control unit. On 12th August 1964 the heavily instrumented 0I-03 took off on one of a series of tests conducted with VVS (air force) and GVF (civil) crews. Take-off was in aeroplane mode, and 15 minutes later at 310km/h the aircraft suddenly turned to the right, ‘not arrested by full rudder and aileron…the aircraft turned almost 180° when Garnayev intervened, considering the problem was differential pitch of the propellers… turn rate slowed, but the aircraft pitched into a steep dive…the engineer jettisoned the flight-deck hatches, and one struck the starboard lift rotor causing asymmetric forces which resulted in separation of the entire starboard nacelle. Garnayev ordered the crew to abandon the aircraft’. Three survived, but Col S.G.Brovtsev, who was flying, and technician A.F.Rogov, were killed. By this time the Mi-6 heavy helicopter was in wide service, and the Ka-22 was ultimately abandoned. Several years later the two surviving machines, 0I-02 and 0I-04, were scrapped. An article about the Ka-22 in Kryl’ya Rodiny (Wings of the Motherland) for November 1992 does not mention the fact that two crashed.
Ka-22
Crew: 5
Engines: 2 x D-25VK turboshaft, 4050kW
Rotor diameter: 22.5m
Fuselage length: 27m
Height: 2.8m
Max take-off weight: 42500kg
Payload: 16500kg
Max speed: 356km/h
Service ceiling: 5500m
Range: 450km