The 1929 Rogers Sea Hawk flying boat first flew in January 1929, piloted by George Rommell.
Engine: 150hp Curtiss C-6 pusher
Wingspan: 40’0″
Length: 31’6″
Useful load: 1045 lb
Max speed: 90 mph
Cruise: 72 mph
Stall: 42 mph
Range: 500 mi
Seats: 4
The 1929 Rogers Sea Hawk flying boat first flew in January 1929, piloted by George Rommell.
Engine: 150hp Curtiss C-6 pusher
Wingspan: 40’0″
Length: 31’6″
Useful load: 1045 lb
Max speed: 90 mph
Cruise: 72 mph
Stall: 42 mph
Range: 500 mi
Seats: 4

Designed by Harry Rogers, as a close copy of the Curtiss F, the 1929 Rogers Sea Eagle RBX flying boat was first powered by a 150hp Hisso A engine, and priced at $12,500. Only the one, NX/NC9735, was built, receiving ATC 274.


Sea Eagle RBX
Engine: 225hp Wright J-6 pusher
Wingspan: 40’0″
Length: 32’0″
Useful load: 1034 lb
Max speed: 105 mph
Cruise: 85 mph
Stall: 43 mph
Range: 270 mi
Seats: 4
Undercarriage: flying boat
This two-place, low-wing monoplane stands on tricycle gear and is propelled by a Lycoming 125-hp engine. Building materials include tubular steel, wood and fabric.
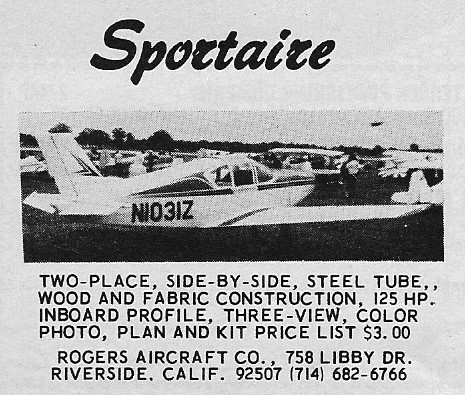
Gross Wt. 1600 lb
Empty Wt. 984 lb
Fuel capacity 22 USG
Wingspan 26’4”
Length 20’6”
Top speed 160 mph
Cruise 150 mph
Stall 55 mph
Climb rate 1000 fpm
Takeoff run 750 ft
Landing roll 500 ft
Range 400 sm

The LSA Ridge Runner is of simple construction. Build time is 275-375 hours, depending on shop set up and experience. A Speed wing was available for all models.
Ridge Runner II is not a full two place. It has a small jump seat or cargo area.

The Model III has dual tandem seating and features a 1600 fpm climb with a Rotax 503, stalls @ 26-28 mph with full flaps, and has an 80 mph cruise.
Ridge Runner Ultralight
Engine: Rotax 277, 28hp
Hp range: 28-75
Wing Span: 26.20 ft
Wing Chord: 46 in
Wing Area: 99.40 sq. ft
Length: 17 ft
Height: 5.17 ft
Width Folded: 8 ft
Est. Empty Weight: 250lbs
Gross Weight: 500lbs
Est. Useful Load: 250lbs
Fuel Capacity: 5 USgal
Range: 175 miles
Rate of Climb: 800 fpm
Cruise Speed: 58 mph
Stall Speed: 24 mph
Takeoff Roll W/flaps: 50 ft
Landing Ground roll: 50 ft
Length Folded: 20 ft
Gear Width: 4.66 ft
Cabin Width: 24 in
Seats: 1
Ridge Runner II
Engine: Rotax 503, 52hp
Hp range: 40-100
Wing Span: 26.20 ft
Wing Chord: 46 in
Wing Area: 99.40 sq. ft
Length: 17 ft
Height: 5.17 ft
Est. Empty Weight: 350lbs
Gross Weight: 900lbs
Est. Useful Load: 550lbs
Fuel Capacity: 5 USgal
Range: 150 miles
Rate of Climb: 1400 fpm
Cruise Speed: 90 mph
Stall Speed: 29 mph
Takeoff Roll W/flaps: 100 ft
Landing Ground roll: 75 ft
Width Folded: 8 ft
Length Folded: 20 ft
Gear Width: 4.66 ft
Cabin Width: 24 in
Ridge Runner III
Est. Empty Weight: 360lbs
Gross Weight: 900lbs
Est. Useful Load: 540lbs
Wing Span: 26.20 ft
Wing Chord: 46 in
Wing Area: 99.40 sq. ft
Length: 17 ft
Height: 5.17 ft
Width Folded: 8 ft
Length Folded: 20 ft
Gear Width: 4.66 ft
Cabin Width: 29″
Fuel Capacity: 10 USgal
Range: 275 miles
Rate of Climb: 1600 fpm
Cruise Speed: 90 mph
Stall Speed: 26-28 mph
Takeoff Roll W/flaps: 40-75 ft
Landing Ground roll: 50-100 ft
A single-seat powered sailplane built in 1957, with 18 hp Zink-Brandl engine.

The X 31 began as an Enhanced Fighter Manoeuvrability (EFM) demonstrator at NASA’s Dryden Flight Research Center at Edwards AFB. Designed to break the “stall barrier,” allowing it to flight at angles of attack which would typically cause an aircraft to stall with a complete loss of control, the X-31 employs thrust vectoring paddles that are located in the jet exhaust and small computer-controlled canards to help keep the aircraft stable at high attack angles. It incorporates an unusual delta wing design and three thrust vectoring paddles made of graphite epoxy and located on the aircraft’s aft fuselage. These direct the engine exhaust to provide control in pitch (up and down) and yaw (right and left) thereby increasing the aircraft’s manoeuvrability. In addition, the X 31 is configured with movable forward canards, wing control surfaces and fixed aft strakes. Coupled with advanced flight control systems, the result confers a significant advantage over conventional fighters in a close in combat situation.
The X 31 is the first co operative international X plane. At Dryden, the International Test Organization (ITO) expanded the flight test envelope. The ITO, managed by the Advanced Research Project Agency (ARPA), includes NASA, the US Navy, the US Air Force, Rockwell Aerospace, the Federal Republic of Germany and Deutsche Aerospace, formerly Messerschmitt Bolkow-Blohm.
To reduce costs, several parts of existing aircraft were used in the X 31. Canopy, ejection seat and control stick were taken from an F/A 18 while several parts of the landing gear and rudder are from an F 16. Brakes and wheels were provided by Cessna and are the same as those used on the Cessna Citation. Piloted by Rockwell chief test pilot Ken Dyson, the first aircraft, serial 164584, flew from Air Force Plant 42, Palmdale, Calif, on October 11, 1990. The second aircraft, 164585, made its first flight on January 19, 1991, with Deutsche Aerospace chief test pilot Dietrich Seeck at the controls. Powered by a single General Electric P404 GE 400 turbofan engine, known to be tolerant in disturbed air and capable to produce 16,000 lb of thrust with afterburner, the maximum speed achieved by the X 31 is Mach 1.28. Controlled flight at 70o angle of attack was accomplished at Dryden on November 6, 1992. On April 29, 1993, the X 31 successfully executed a rapid minimum radius, 180o turn using a post stall manoeuvre, flying well beyond the aerodynamic limits of any conventional aircraft. Later that summer, the first simulated dog-fights were performed against a NASA F/A-18 Hornet. This resulted in 63 victories for the X-31.
The first X-31 was lost in an accident on January 19, 1995, on its 292nd flight. Due to miscommunication between pilot and air traffic control and a missing pitot tube heating system the German pilot, Karl Heinz Lang, had to eject from his uncontrollable aircraft at 18,000ft. The aircraft crashed near Edwards AFB.
The second X-31 completed the 580th and last flight of its original research program on 13 May 1995 and was placed in storage.
In February 1998, the participating contractors started VECTOR Risk Reduction and Requirements Definition. The aircraft was shipped to NAS Patuxent River in April 2000, where it was largely rebuilt for the Vector (Vectoring Extremely Short Take-Off and Landing Control Tailless Operation Research) program.
VECTOR stands for Vectoring Extremely Short Take-Off and Landing Control and Tailless Operational Research and is being used to research extremely short take off and landing capabilities and also the aerodynamic characteristics of tailless flight using integrated thrust vector control. Three technology areas are involved:
Extremely Short Take Off and Landing (ESTOL) using thrust vectoring control
This incorporated a new flight control software system was installed together with an auto throttle system, a belly mounted video camera and components of inertial navigation and global positioning systems. The revised aircraft made its first flight for Vector on 24 February 2001. After two months of basic flight testing, the aircraft began a year of upgrading and ground testing to perform ESTOL landings to a “virtual runway” at 5,000 feet. The X-31 took to the air again on 17 May 2002.
In these flights the aircraft flew thrust vectored, high precision ESTOL landings at reduced speeds and at high angles of attack.
To perform the automated approach, the pilot must fly into an invisible engagement box in the sky, then activate the ESTOL mode. Once successfully engaged, the pilot is not in control but is able to override the approach at any point. A video camera under the belly of the aircraft will allow the pilot to view the runway prior to landing because a pilot loses sight at anything above 15 degree angle of attack, so during final approach the aircraft will be controlled by autopilot. Coming in with its nose pointed high above the horizon, the first part of the aircraft to touch the runway would be the engine nozzle and not the landing gear. To prevent such an event, the X 31 performs [an automatic] derotation manoeuvre when the tail is just two feet above the runway, dropping onto its main landing gear. Timing of this manoeuvre is crucial; if the aircraft derotates early and drops too far, the landing gear could fail; if the aircraft derotates too late or too low, the tail could strike the runway. The aircraft is guided during approach by an Integrity Beacon Landing System (IBLS) which uses differential GPS data together with ground-based beacons to determine the aircraft’s position ensuring accurate positioning within two centimetres.
After 51 flights, the X 31 completed its first test phase on March 22, 2003, with two supersonic flights focussing on FADS performance. Pilot Knoptel reached speeds of Mach 1.06 and 1.18, in full afterburner at 39,000ft. While supersonic, he induced combinations of angle of attack and sideslip to tax the FADS. By night, engineers had processed the data and were able to confirm that the FADS was performing as desired throughout the flight regime.
This cleared the way for the final phase of flight tests that began in early April 2003 and ended on April 29 when the last ESTOL landing was performed by Maj Allee following a week of successful testing the world’s first fully automated, thrust vectoring landings. This landing was performed with an angle of attack of 24 o and a speed of 121kt, a reduction of 31% compared with the normal landing speed of 175kt. The X 31 requires a normal runway length of 8,000ft to stop after a conventional landing, but after the final ESTOL landing, the aircraft needed just 1,700ft to slow down enough to turn around on the runway.
Sponsors: DARPA, USN, German MoD
Fastest Flight: Mach 1.28 (900 mph)
Highest Flight: 40,000 feet (approx)
X 31
Powerplant: One General Electric P404¬GE 400 turbofan, 16,0001b thrust with afterburner
Span; 23,83ft (7.3m)
Length, 43.33ft (12.8m)
Take off weight, 16,1001b (7,303kg)
Max achieved speed, Mach 1,28 at 35,000ft
Max achieved altitude, 40,000ft (12,200m)
X-31A
Powerplant: one 10,600-lb (4808-kg) thrust General Electric F404-GE-400 non-afterburning turbofan
Wingspan 23 ft 10 in (7.26 m)
Length 43 ft 4 in (13.21 m) excluding probe
Height 14 ft 7 in (4.44 m)
Wing area 226.3 sq ft (21.02 sq.m)
Canard foreplane area 23.6 sq ft (2.19 sq.m)
Maximum speed 597 mph (961 km/h) or Mach 0.9 at 35,000 ft (10,670 m)
Empty weight 10,212 lb (4632 kg)
Maximum take-off 13,968 lb (6335 kg)
Crew: 1

Rockwell became responsible in 1972 for development of the US Navy’s XFV-12A V/STOL Fighter/Attack Technology Prototype programme.
Basically a single-seat all-weather V/STOL fighter/ attack aircraft, the XFV-12A made use of an augmentor wing concept in which the efflux of its single Pratt & Whitney F401-PW-400 afterburning turbofan engine could be diverted to nozzles in the wings and foreplanes for V/STOL operations.
An ejector-flap system was incorporated in the design of each wing and foreplane, in which ambient air was mixed with turbine efflux in a ratio of 7:1 to provide the essential jet-lift for vertical operations and, when the flaps are raised or lowered progressively, for transition from vertical to horizontal flight and vice versa.
The main landing gear, canopy and other cockpit parts came from an A-4 Skyhawk. The main wing box and parts of the inlets were from an F-4 Phantom.
The XFV-12 did get off the ground – and was tested in a tethered mode, but the programme proved a disappointment and failed to provide an alternative to the Harrier.
Engine: 1 x 133.4kN Pratt & Whitney F401-PW-400 turbofan
Max take-off weight: 11000 kg / 24251 lb
Wingspan: 8.69 m / 29 ft 6 in
Length: 13.35 m / 44 ft 10 in
Height: 3.15 m / 10 ft 4 in
Ford V-8 engine two-seat light aircraft
Mathis radial engine two-seat light aircraft
Renault engine two-seat light aircraft
